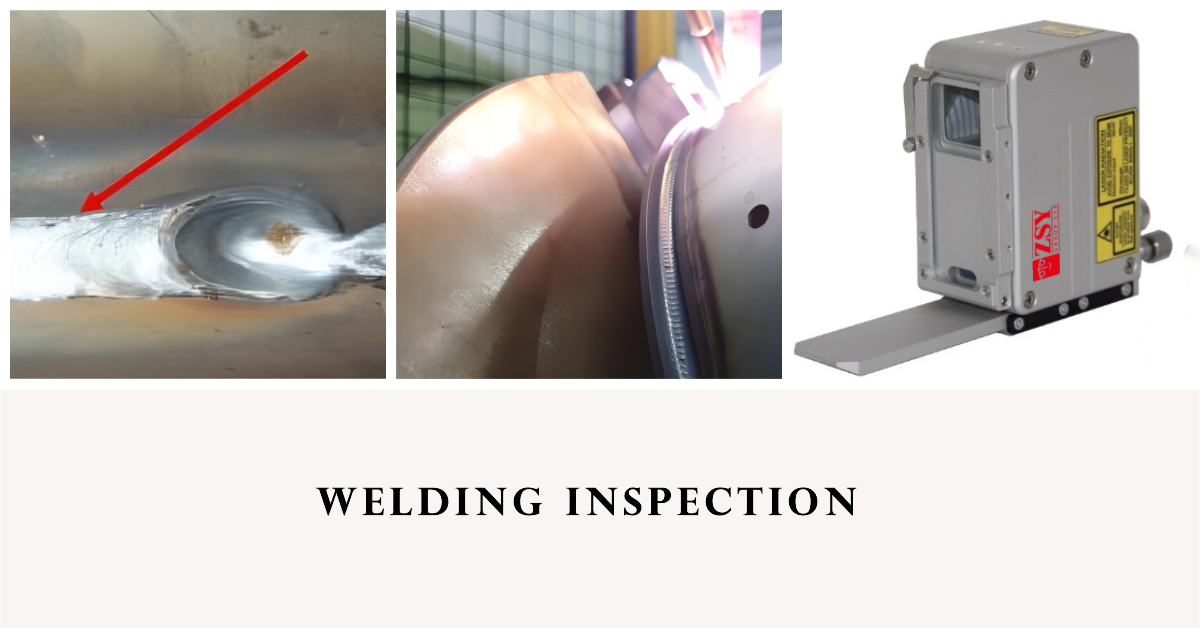
ZLDS202Smart-Weld激光焊缝跟踪系统旨在作为工业机器人焊接系统的一部分,在焊接过程中自动控制焊接头的位置、测量焊接坡口的几何参数,并为操作人员提供焊接过程可视化控制的可能。
系统的主要部件是ZLDS202Smart-Weld激光二维扫描仪,采用该传感器让我们为机器人焊接创建了真正的智能解决方案。
ZLDS202Smart-Weld激光焊缝跟踪系统目前市场上唯一一个由扫描仪本身生成焊接轨迹、将焊枪保持在最佳位置,并将路径坐标(或速度)传输给机器人控制器的的系统。
画册下载
ZLDS202Smart-Weld激光焊缝跟踪系统特点:
●扫描仪与焊接机器人控制器直接连接,无需任何中间计算模块;
●可以控制焊接机器人的运动和焊接过程的全周期;
●内置主流焊接机器人接口,比如Kuka、Fanuc、Jaka等;
●适配各类焊接接头;
●可以在扫描仪的web界面内使用智能块图简单直观地构建工作算法;
●可视化三维实时跟踪;
●提供各种不同量程的扫描仪及配套装置,极大优化了焊接条件下的工作。
与竞争对手的同类产品相比,用于焊接自动化的激光焊缝跟踪系统ZLDS202Smart-Weld Series具有更高的可靠性、可用性和灵活性。
ZLDS202Smart-Weld激光焊缝跟踪系统包括以下主要部件和可选部件:

1、激光扫描仪ZLDS202Smart-Weld。
ZLDS202smart-Weld在以下选项中与ZLDS202Smart基本配置不同(PS:ZLDS202Smart基本配置在ZLDS202Smart的用户手册中):
● 用于与机器人和外部工业系统进行数据交换的内置软件包:ZLDS202Smart-Industrial, ZLDS202Smart-Robots。
● 用于在焊接过程中提供保护,防止侵略性影响的特殊保护设计,即特殊的阀体、可更换的保护玻璃、气动百叶窗、保护罩、吹窗系统。
● 用于将扫描仪安装到焊接机器人上的特殊设备。可以为扫描仪配备气动系统,以便将扫描仪从焊接区域移走。
● 预定义的工作范围,为焊接任务提供解决方案。
● 主要类型的焊接槽的现成的模板,而且支持纠正现有的模板和添加新的模板。
激光二维扫描仪ZLDS202Smart-Weld的外壳由阳极氧化铝制成,壳体的前面板有两个窗口:输出窗口和接收窗口。扫描仪上方有一个线缆接口,复位按钮(Reset)和LED指示灯。按复位按钮5秒将重新启动扫描仪。按下复位按钮(Reset)1秒后,将发送广播Hello报文。红色指示灯表示固件正在加载;绿色指示灯表示以太网连接已建立。
ZLDS202Smart-Weld系列激光扫描仪默认具备以下功能:
● 扫描仪窗口的额外保护快换玻璃
● 用于供应压缩空气以保护窗户的特殊配件(“气刀”系统)
● 保护罩
● 扫描仪快速安装设备
扫描仪可提供以下两种激光波长:红色660 nm、蓝色450nm。不同的应用采用不同的激光器。当被测物是闪亮材料和高温物体时,使用蓝色激光代替红色激光是最佳选择。
针对全工作范围,扫描仪有两种工作模式:频率为484 Hz (profiles/second)的基本模式、频率为921 Hz的DS模式。
具备ROI功能,可以在有限的工作范围内提高扫描仪的工作频率,基本模式下最高可达4884 Hz, DS模式下最高可达6379 Hz。
2、坚固耐用的工业平板电脑(可选) ——预装软件,可自动在网络上搜索扫描仪并打开其web界面
3、工业以太网交换机(可选)
4、扫描仪电气保护模块(可选)
5、线缆

ZLDS202Smart-Weld激光焊缝跟踪系统应用领域:
激光焊缝跟踪系统ZLDS202Smart-Weld Series旨在作为工业机器人焊接系统的一部分,在焊接过程中自动控制焊接头的位置、测量焊接坡口的几何参数,并为操作人员提供焊接过程可视化控制的可能。



ZLDS202Smart-Weld激光焊缝跟踪系统技术规格:

ZLDS202Smart-Weld激光焊缝跟踪系统测量原理:
系统工作原理:
1、将激光扫描仪ZLDS202Smart-Weld安装在机器人法兰上,靠近焊枪,在焊接过程中,沿焊接坡口移动时,扫描仪在焊接工具前面。
2、对扫描仪进行校准,得到坐标变换矩阵(PS:ZLDS202Smart的用户手册中描述了校准过程)。
3、利用扫描仪的web界面,考虑到设备的具体情况,即机器人类型、通信协议、凹槽类型、用于控制位置的凹槽模板的几何参数以及应用于它们的约束等,从智能块库(示例在本系统的用户手册中有给出)中形成计算图。如果提供的文件不包含所需的凹槽模板,用户可以自己创建一个新模板或在制造商的支持下使用提供的模板编辑器(参见ZLDS202Smart用户手册)。
4、配置控制坡口跟踪块和焊接机器人的脚本(脚本示例在本用户手册中给出)。控制脚本提供了焊接主要阶段的循环执行:将焊接工具放置在起始位置,将工具朝坡口开始方向移动(寻找进入坡口的入口点),将工具带到坡口开始,并向外部系统(焊接控制器)产生需要点火等动作的信号,停止机器人运动,将坐标传递给机器人,使工具沿着焊接坡口移动,将工具移至坡口末端,并向外部系统(焊接控制器)发出减少电流或灭弧(以及其他动作)的信号,将工具移至原始位置。
5、在操作过程中,扫描仪接收到的每个剖面都按照视图中指定的算法进行处理,并执行以下步骤:检测焊接坡口模板以确定扫描器坐标系(2D)中的精确坐标,将坐标从扫描器坐标系转换为机器人坐标系(3D),形成刀具在机器人坐标系中的轨迹,将坐标传递给机器人用于移动到轨迹的下一个位置。

ZLDS202Smart-Weld扫描仪工作原理:光学三角测量原理(见下图)。
半导体激光器的辐射是由一条直线上的透镜投射到一个物体上而形成的。从物体散射的辐射由透镜收集并定向到一个二维CMOS图像传感器。通过FPGA和信号处理器对形成的物体轮廓图像进行分析,计算出物体上激光直线上各点到物体的距离(z坐标)。扫描仪的特征是Z坐标的量程起点(SMR), Z坐标的量程起点(MR), Z坐标的量程起点(Z)。
ZLDS202Smart-Weld激光焊缝跟踪系统应用领域:
激光焊缝跟踪系统ZLDS202Smart-Weld Series旨在作为工业机器人焊接系统的一部分,在焊接过程中自动控制焊接头的位置、测量焊接坡口的几何参数,并为操作人员提供焊接过程可视化控制的可能。
ZLDS202Smart-Weld激光焊缝跟踪系统应用领域:
激光焊缝跟踪系统ZLDS202Smart-Weld Series旨在作为工业机器人焊接系统的一部分,在焊接过程中自动控制焊接头的位置、测量焊接坡口的几何参数,并为操作人员提供焊接过程可视化控制的可能。
ZLDS202Smart-Weld激光焊缝跟踪系统安装尺寸:
尺寸图1:
.png")
尺寸图2:
.png")
尺寸图3:
.png")
尺寸图4:

尺寸图5:


英国真尚有_大量程线激光传感器|大范围高温物体轮廓扫描仪|ZLDS210
ZLDS210激光二维传感器是一款非接触式的大范围高精度激光二维扫描传感器,它具有结构坚固、测量精度高等特点,在二维测量与轮廓测量方面拥有大量成功应用。ZLDS210二维传感器利用三角测量法进行测量:激光以50°夹角范围在被测物表面进行来回扫描测量。而根据漫反射聚焦成像原理,它几乎可以测任何材料或液体的表面,因此该产品特别适用于测量高温和高亮度被测体。同时ZLDS210还有一个配套的DLL库,它可以为窗口程序提供频率为2K或6KHz的数字信号。
画册下载

英国真尚有_高温激光位移传感器|高温激光测距|ZLDS114|ZLDS115
ZLDS114|ZLDS115测高温激光位移传感器因其具有抗干扰性强、在强光环境下也能得到理想的测量效果等特性,特别适用于高温物体的测量。除此之外,它还具有实时编程功能。同时其先进的激光传感器技术可广泛适用于石油、化工、冶金等行业。它拥有的同步测厚功能,能不借助额外控制器和校准设备,只需将2个该高温传感器成对安装可构成测厚仪(能自动主从识别),实时进行在线厚度测量,且可用于高温测厚。
在高温环境下,可配备水冷保护壳保护传感器。
ZLDS114|ZLDS115测高温激光位移传感器四周环绕着 5 个水室。这确保了非常有效的冷却和保护,并允许传感器在靠近炽热目标(如高温钢板)的地方正常运行。
画册下载

英国真尚有_低成本_线激光轮廓扫描仪|线扫激光传感器|激光二维传感器|ZLDS202(原ZLDS200升级款)
低成本线激光轮廓扫描仪ZLDS202专为高精度二维轮廓扫描而设计,同时具备速度(高达16KHz)、精度和卓越性能,线激光传感器的Z轴具有0.01%的线性度,X轴具有高达2912个点的分辨率 ,可稳定且高精度测量所有难以检测的物体。
ZLDS202系列包括:
ZLDS202 — 内置测量功能的激光轮廓扫描仪;
ZLDS202-HS —高速版本,不低于4000 轮廓/秒 (全量程),不低于16000 轮廓/秒 (ROI模式).;
ZLDS202-HSR — 高速高精度版本,不低于1000 轮廓/秒 (全量程),不低于16000 轮廓/秒 (ROI模式).X轴分辨率为1280或2560个点.
ZLDS202-HSR2 — 高速高精度超宽激光线版本(X轴宽度/Z轴量程≥2.5),不低于4000 轮廓/秒 (全量程),不低于16000 轮廓/秒 (ROI模式).X轴分辨率为1280或2560个点.
ZLDS202-2Cam — 内置测量功能和工业协议的双头激光轮廓扫描仪;
画册下载
![]() 英国真尚有_低成本、可定制线激光传感器_轮廓扫描仪ZLDS202 V1.0.pdf
英国真尚有_低成本、可定制线激光传感器_轮廓扫描仪ZLDS202 V1.0.pdf
内径测量仪精密轮廓检测系统微观型面测量系统静态形变测量系统精密在线测厚系统振动测量系统无人警卫船光伏清洁机器人智能垃圾压实机智能机器人自稳定无人机起落平台空气质量检测仪桥梁结构健康检测系统其他检测系统
焊缝分析软件3D数据处理软件工业物联网平台电涡流软件预测分析软件AI软件计算机视觉平台数据平台解决方案服务免代码软件集成平台定制软件
测速测长_测距传感器 | 测距仪皮米级电容位移传感器线激光轮廓扫描仪 | 线扫激光传感器激光位移传感器线性位置传感器光谱共焦传感器Kaman传感器系统干涉仪测径仪 | 测微计 | 激光幕帘千分尺传感器纳米平台光栅传感器地下探测仪光纤传感器太赫兹传感器液位测量传感器倾角 | 加速度测量传感器3D扫描传感器视觉相机 | 3D相机水下测量仪磁耦合线性执行器磁场传感器雷达传感器石墨烯霍尔效应传感器卷材位置传感器振动测量传感器结构检测传感器监控电涡流传感器水听器校准器无线光学通讯传感器网关纳米级电涡流传感器其它检测设备
0755-26528100
0755-26528011
18145802139(微信同号)