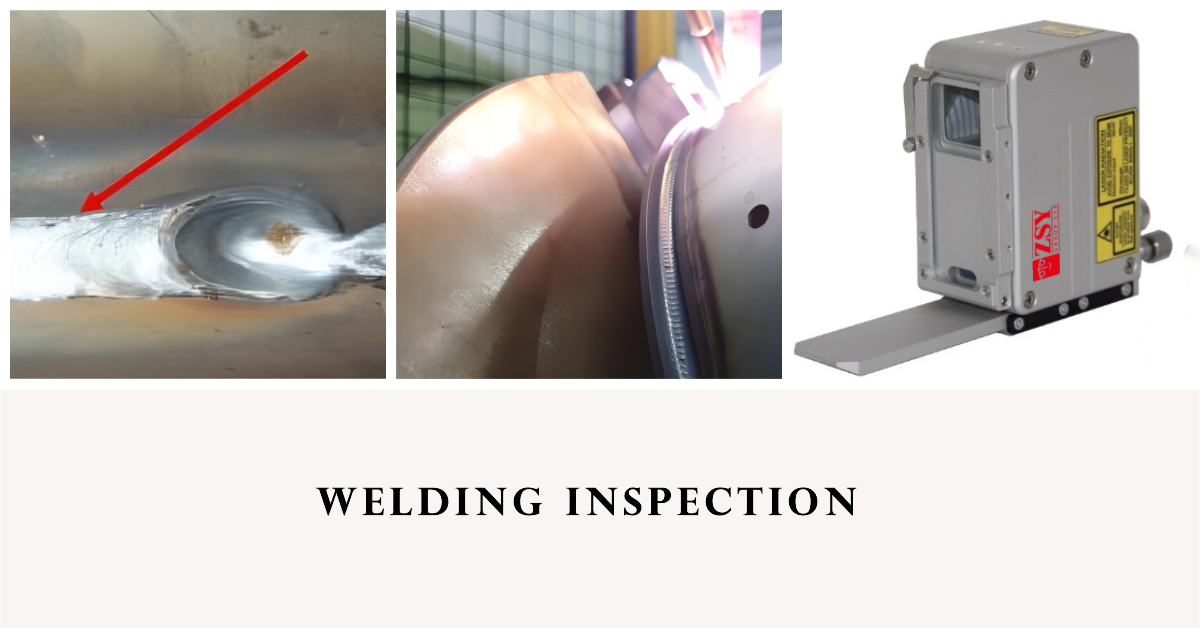
ZLDS202Weld焊接专用轮廓扫描仪设计用于机器人焊接系统,旨在在焊接过程中自动控制焊头的位置。系统包括配备有风冷系统的激光扫描仪、可更换的眼镜和专门用于将扫描仪固定到焊接机器人的特殊连接机构。
扫描仪的外壳由阳极氧化铝制成。外壳的前面板有两个窗口:输出窗口和接收从受控对象反射的辐射的窗口。
ZLDS202Weld焊接专用轮廓扫描仪安装在焊枪旁边的机器人法兰上。
扫描区域位于焊接电极正前方几厘米处扫描仪控制器根据确定焊接接头准确坐标的选定数学算法处理从扫描仪接收的信息。扫描仪控制器实时将坐标传输给机器人控制器,机器人控制器在焊接过程中修正焊枪位置。
画册下载
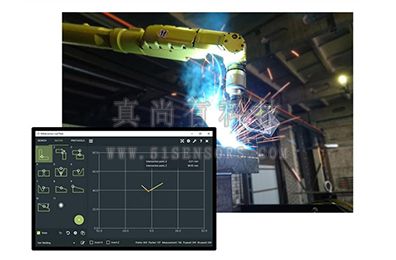
ZLDS202Weld焊接专用轮廓扫描仪特点:
根据所选模板自动识别要测量的对象。无需手动设置测量区域;
降噪:对侧边物体进行智能过滤;
实现与工业机器人通信的各种协议;
根据机器人手臂校准扫描仪。
ZLDS202Weld焊接专用轮廓扫描仪应用领域:
设计用于机器人焊接系统,旨在在焊接过程中自动控制焊头的位置。

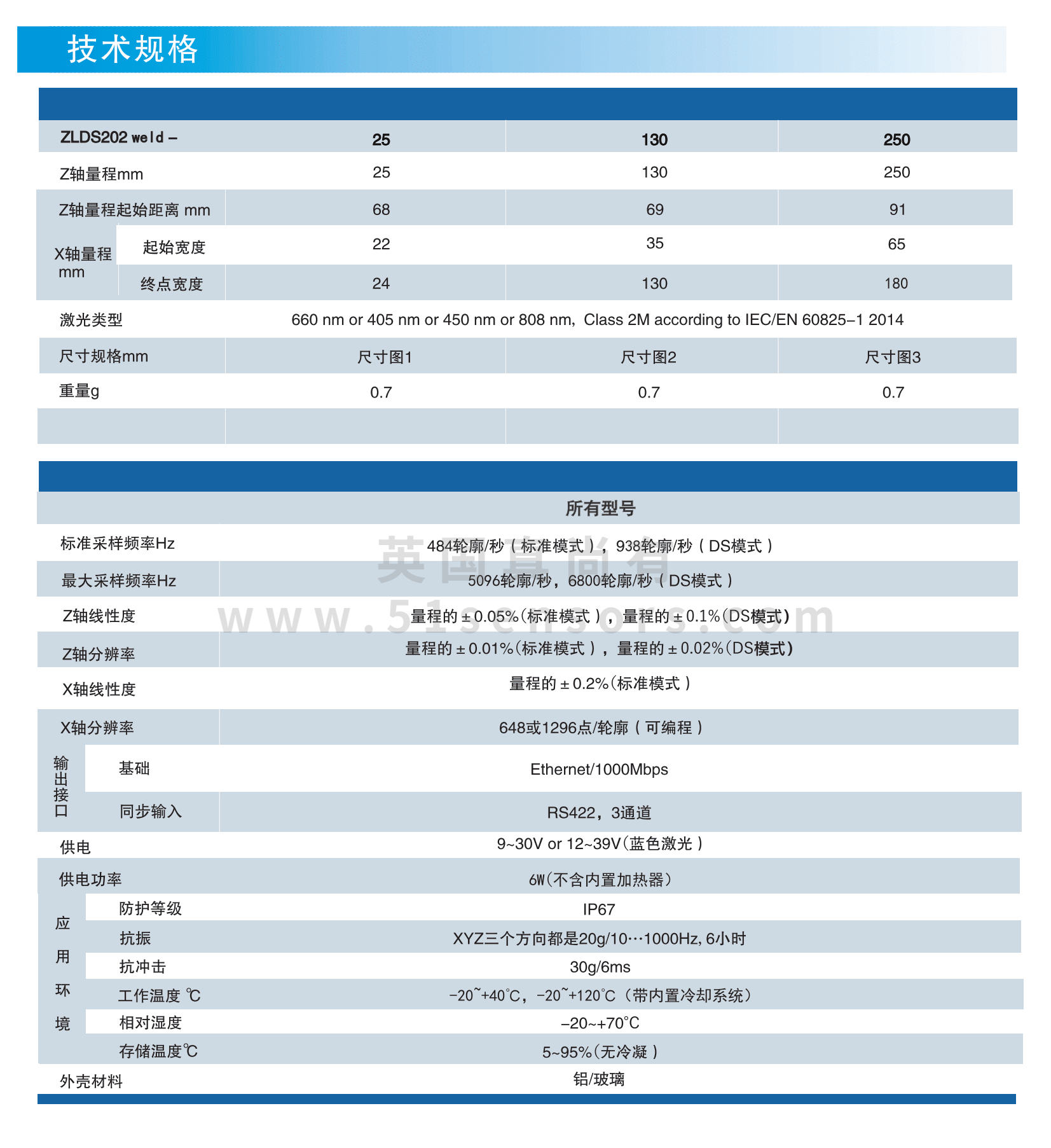
ZLDS202Weld焊接专用轮廓扫描仪技术规格:
ZLDS202Weld焊接专用轮廓扫描仪测量原理:
基于光学三角测量原理(见下图)。
半导体激光器的辐射是由一条直线上的透镜投射到一个物体上而形成的。从物体散射的辐射由透镜收集并定向到一个二维CMOS图像传感器。通过FPGA和信号处理器对形成的物体轮廓图像进行分析,计算出物体上激光直线上各点到物体的距离(z坐标)。扫描仪的特征是Z坐标的量程起点(SMR), Z坐标的量程起点(MR), Z坐标的量程起点(Z)。
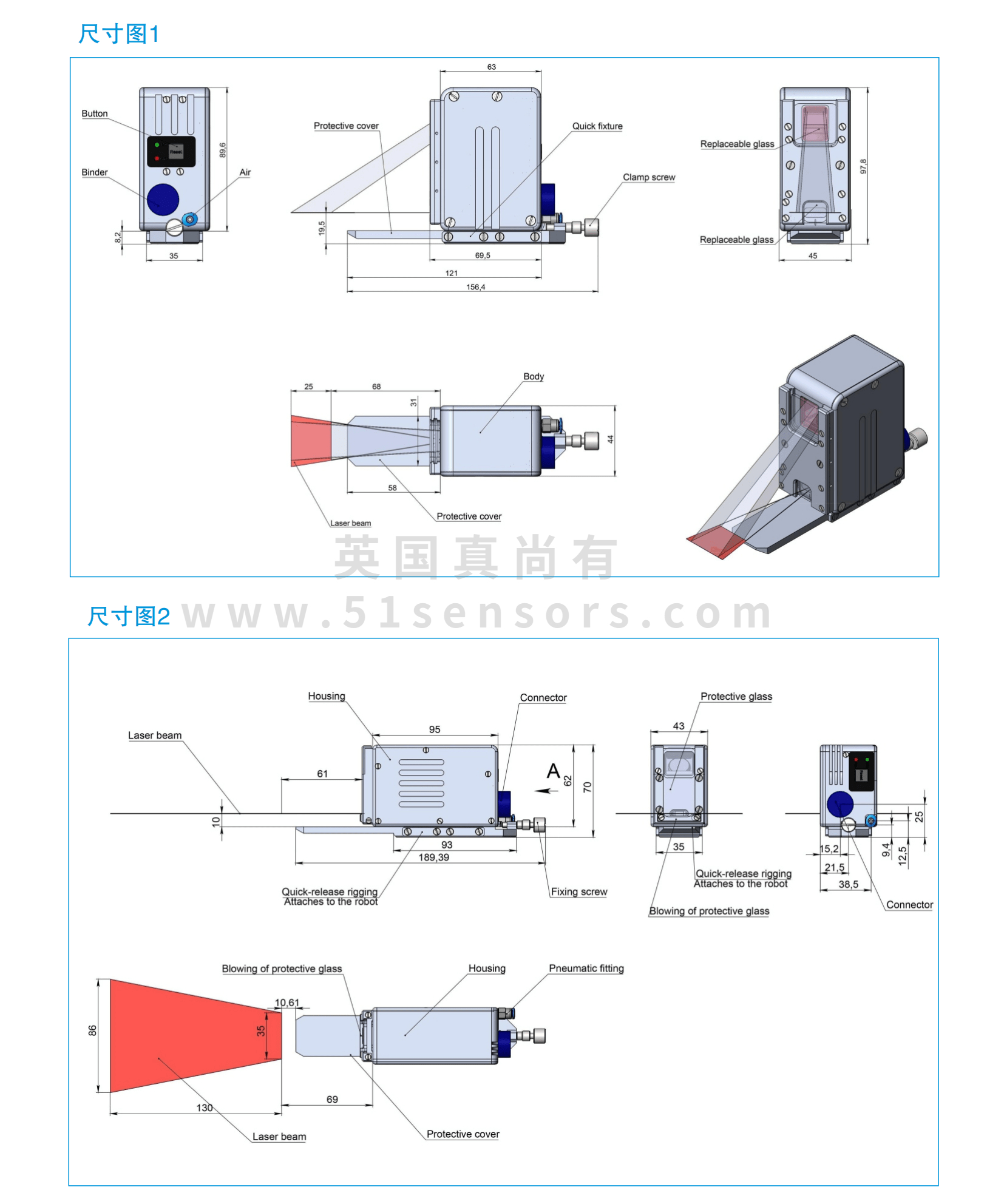
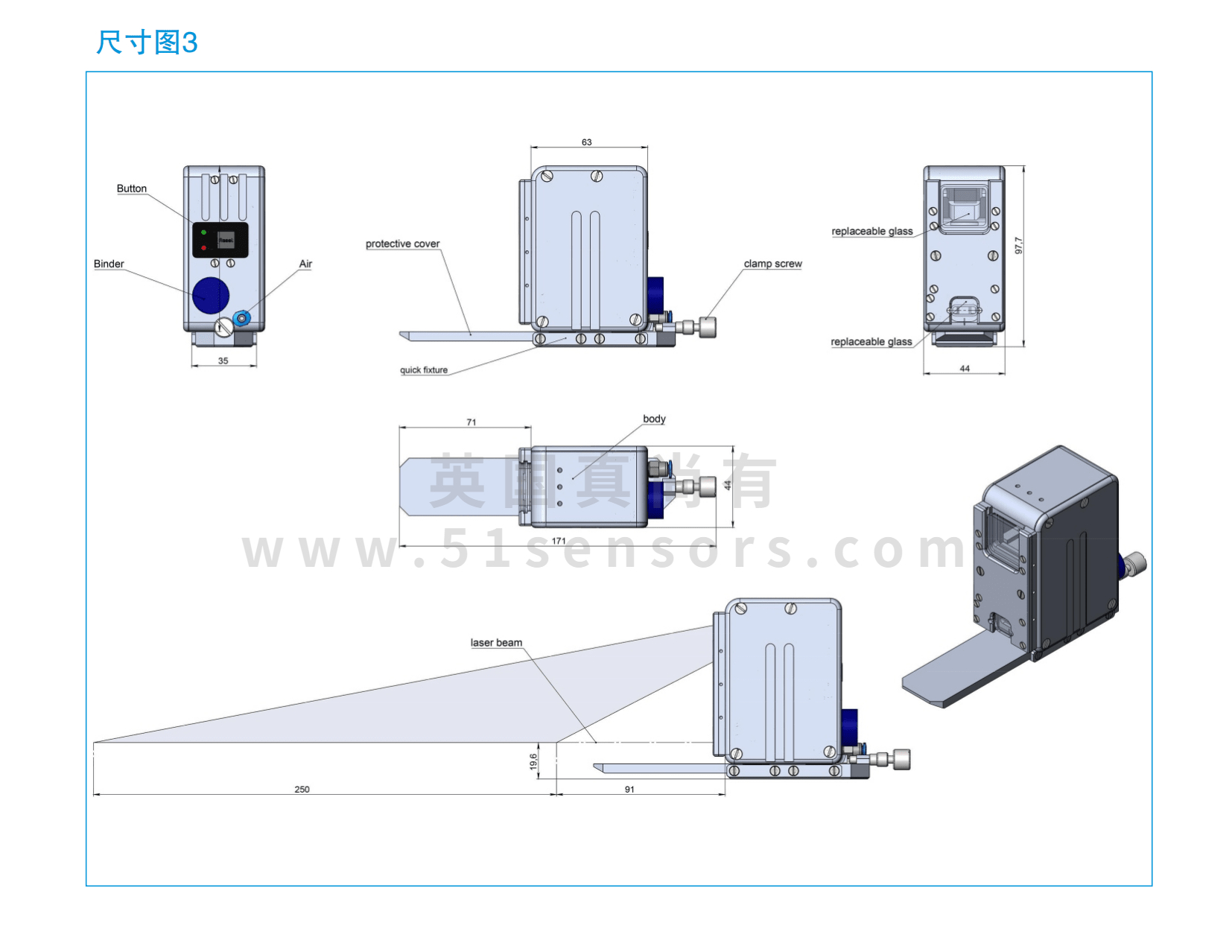
ZLDS202Weld焊接专用轮廓扫描仪安装尺寸:

英国真尚有_大量程线激光传感器|大范围高温物体轮廓扫描仪|ZLDS210
ZLDS210激光二维传感器是一款非接触式的大范围高精度激光二维扫描传感器,它具有结构坚固、测量精度高等特点,在二维测量与轮廓测量方面拥有大量成功应用。ZLDS210二维传感器利用三角测量法进行测量:激光以50°夹角范围在被测物表面进行来回扫描测量。而根据漫反射聚焦成像原理,它几乎可以测任何材料或液体的表面,因此该产品特别适用于测量高温和高亮度被测体。同时ZLDS210还有一个配套的DLL库,它可以为窗口程序提供频率为2K或6KHz的数字信号。
画册下载

英国真尚有_高温激光位移传感器|高温激光测距|ZLDS114|ZLDS115
ZLDS114|ZLDS115测高温激光位移传感器因其具有抗干扰性强、在强光环境下也能得到理想的测量效果等特性,特别适用于高温物体的测量。除此之外,它还具有实时编程功能。同时其先进的激光传感器技术可广泛适用于石油、化工、冶金等行业。它拥有的同步测厚功能,能不借助额外控制器和校准设备,只需将2个该高温传感器成对安装可构成测厚仪(能自动主从识别),实时进行在线厚度测量,且可用于高温测厚。
在高温环境下,可配备水冷保护壳保护传感器。
ZLDS114|ZLDS115测高温激光位移传感器四周环绕着 5 个水室。这确保了非常有效的冷却和保护,并允许传感器在靠近炽热目标(如高温钢板)的地方正常运行。
画册下载

英国真尚有_低成本_线激光轮廓扫描仪|线扫激光传感器|激光二维传感器|ZLDS202(原ZLDS200升级款)
低成本线激光轮廓扫描仪ZLDS202专为高精度二维轮廓扫描而设计,同时具备速度(高达16KHz)、精度和卓越性能,线激光传感器的Z轴具有0.01%的线性度,X轴具有高达2912个点的分辨率 ,可稳定且高精度测量所有难以检测的物体。
ZLDS202系列包括:
ZLDS202 — 内置测量功能的激光轮廓扫描仪;
ZLDS202-HS —高速版本,不低于4000 轮廓/秒 (全量程),不低于16000 轮廓/秒 (ROI模式).;
ZLDS202-HSR — 高速高精度版本,不低于1000 轮廓/秒 (全量程),不低于16000 轮廓/秒 (ROI模式).X轴分辨率为1280或2560个点.
ZLDS202-HSR2 — 高速高精度超宽激光线版本(X轴宽度/Z轴量程≥2.5),不低于4000 轮廓/秒 (全量程),不低于16000 轮廓/秒 (ROI模式).X轴分辨率为1280或2560个点.
ZLDS202-2Cam — 内置测量功能和工业协议的双头激光轮廓扫描仪;
画册下载
![]() 英国真尚有_低成本、可定制线激光传感器_轮廓扫描仪ZLDS202 V1.0.pdf
英国真尚有_低成本、可定制线激光传感器_轮廓扫描仪ZLDS202 V1.0.pdf
内径测量仪精密轮廓检测系统微观型面测量系统静态形变测量系统精密在线测厚系统振动测量系统无人警卫船光伏清洁机器人智能垃圾压实机智能机器人自稳定无人机起落平台空气质量检测仪桥梁结构健康检测系统其他检测系统
焊缝分析软件3D数据处理软件工业物联网平台电涡流软件预测分析软件AI软件计算机视觉平台数据平台解决方案服务免代码软件集成平台定制软件
测速测长_测距传感器 | 测距仪皮米级电容位移传感器线激光轮廓扫描仪 | 线扫激光传感器激光位移传感器线性位置传感器光谱共焦传感器Kaman传感器系统干涉仪测径仪 | 测微计 | 激光幕帘千分尺传感器纳米平台光栅传感器地下探测仪光纤传感器太赫兹传感器液位测量传感器倾角 | 加速度测量传感器3D扫描传感器视觉相机 | 3D相机水下测量仪磁耦合线性执行器磁场传感器雷达传感器石墨烯霍尔效应传感器卷材位置传感器振动测量传感器结构检测传感器监控电涡流传感器水听器校准器无线光学通讯传感器网关纳米级电涡流传感器其它检测设备
18145802139(微信同号)
0755-26528100
0755-26528011