众所周知,GPS可以为车辆提供精度为米级的绝对定位,差分GPS或RTKGPS可以为车辆提供精度为厘米级的绝对定位,然而并非所有的路段在所有时间都可以得到良好的GPS信号。因此,在自动驾驶领域,RTKGPS的输出一般都要与IMU,汽车自身的传感器(如轮速计、方向盘转角传感器等)进行融合。其中,IMU通常由陀螺仪、加速剂和算法处理单元组成,通过对加速度和旋转角度的测量得出自体的运动轨迹。我们把传统的IMU和与车身、GPS等信息融合的算法组合在一起的系统称为广义的、针对自动驾驶的IMU。
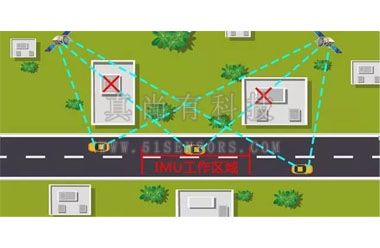
GPS在一些地点会消失,难以对汽车提供定位服务,IMU可以在GPS信号消失之后,仍然提供定位服务。
严格来讲,IMU只提供相对定位信息,即自体从某时刻开始相对于某个起始位置的运动轨迹和姿态。然而,将IMU的相对定位与RTKGPS的绝对定位进行融合后,就产生了两个无可替代的优点:
1、IMU可以验证RTKGPS结果的自洽性,并对无法自洽的绝对定位数据进行滤波和修正;一个简单的例子是,如果RTKGPS输出汽车的绝对位置在短时间内发生了很大的变化,这意味着汽车有很大的加速度,而此时IMU发现汽车并不具备这样的加速度,就表明RTKGPS的定位出了问题,应该由IMU来接管绝对定位系统;
2、IMU可以在RTKGPS信号消失之后,仍然提供持续若干秒的亚米级定位精度,为自动驾驶汽车争取宝贵的异常处理的时间。同样的道理,IMU也可以在相对定位失效时,对相对定位的结果进行航迹推演,在一段时间内保持相对定位的精度;例如,在车道线识别模块失效时,基于失效前感知到的道路信息和IMU对汽车航迹的推演,仍然能够让汽车继续在车道内行驶。
真尚有科技提供各种自动驾驶方案,我们不仅仅提供技术方面的支持,基于我们在行业内超过15年的积累,协助客户一起把原始需求迭代为完整方案,最终服务您的方案蓝图反而是我们更注重的地方。我们始终相信成交靠缘分,不管您是否从我们这里采购,我们都非常乐意为您服务。
内径测量仪精密轮廓检测系统微观型面测量系统静态形变测量系统精密在线测厚系统振动测量系统无人警卫船光伏清洁机器人智能垃圾压实机智能机器人自稳定无人机起落平台空气质量检测仪桥梁结构健康检测系统其他检测系统
焊缝分析软件3D数据处理软件工业物联网平台电涡流软件预测分析软件AI软件计算机视觉平台数据平台解决方案服务免代码软件集成平台定制软件
测速测长_测距传感器 | 测距仪皮米级电容位移传感器线激光轮廓扫描仪 | 线扫激光传感器激光位移传感器线性位置传感器光谱共焦传感器Kaman传感器系统干涉仪测径仪 | 测微计 | 激光幕帘千分尺传感器纳米平台光栅传感器地下探测仪光纤传感器太赫兹传感器液位测量传感器倾角 | 加速度测量传感器3D扫描传感器视觉相机 | 3D相机水下测量仪磁耦合线性执行器磁场传感器雷达传感器石墨烯霍尔效应传感器卷材位置传感器振动测量传感器结构检测传感器监控电涡流传感器水听器校准器无线光学通讯传感器网关纳米级电涡流传感器其它检测设备
18145802139(微信同号)
0755-26528100
0755-26528011